Kaikkihan tietätävät että graafin solmujen välillä olevien 
Määritelmä
Matriisien 








Huom. Sallimme matriisin alkioksi myös plus äärettömän 




Esimerkki

 muodostuminen korostettuna. Matriisi
muodostuminen korostettuna. Matriisi  on alla esiintyvän graafin kaarien painomatriisi.
on alla esiintyvän graafin kaarien painomatriisi.Mihin tätä summaa sitten käytetään? Sen avulla voidaan selvittää lyhyimmät reitit kaikkien solmuparien välillä graafissa, jonka kaarille on annettu ei-negatiiviset painokertoimet (etäisyydet). Muodostetaan graafille 





Kaaret ajatellaan suunnaatuiksi, mutta suuntaamattomassa tapauksessa ajatellaan, että kaari on kumpaankin suuntaan olemassa (samalla painolla). Suuntaamattomassa tapauksessa matriisi
 . Ensimmäinen rivi ja sarake ovat indeksejä.
. Ensimmäinen rivi ja sarake ovat indeksejä.Lasketaan matriisin 







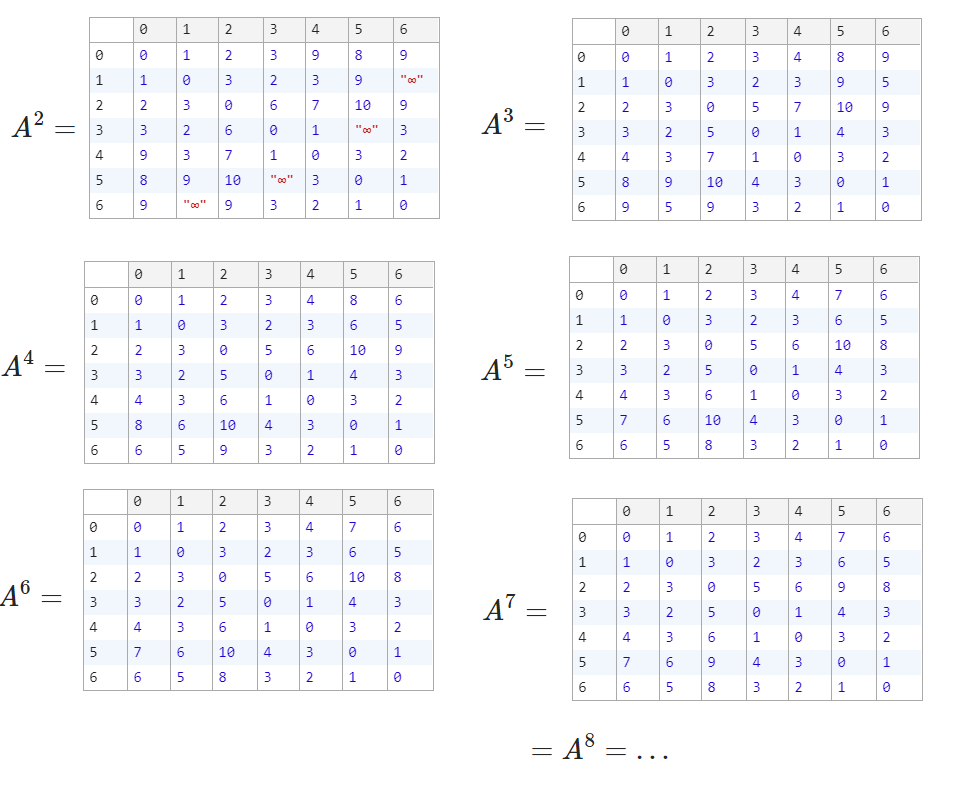
 lähtien. Kuten voidaan todeta, eniten askelia vievä lyhyin reitti (solmujen
lähtien. Kuten voidaan todeta, eniten askelia vievä lyhyin reitti (solmujen  ja
ja  välillä) on 6 askelta: 2-0-1-3-4-6-5 ja sen pituus on
välillä) on 6 askelta: 2-0-1-3-4-6-5 ja sen pituus on  . Se käykin kaikki graafin solmut läpi, joten tämä on maksimitapaus.
. Se käykin kaikki graafin solmut läpi, joten tämä on maksimitapaus.Reitin selvitys
Lyhyimmän reitin pituus on luettavissa matriisin 








Huomioita
- Jos matriisin jää äärettömyyksiä jonon stabiloiduttua, tarkoittaa se että graafi on epäyhtenäinen: jostain solmusta ei ole mitään reittiä johonkin toiseen solmuun.
- Stabiloituminen vie korkeintaan
askelta, sillä lyhyin reitti ei vieraile missään solmussa kuin korkeintaan kerran.
- Pienempiä (ennen stabiloitumista) iterantteja voi käyttää askelten määrän ollessa rajoitettu, sillä ne tosiaan kertovat sen hetkisen lyhyimmän etäisyyden kun käytetään korkeintaan
- Algoritmin kehittäjä on Stephen Hedetniemi. Lisätietoa historiasta Seuran artikkelissa. Hedetniemen nimissä on myös graafien tensoritulon väritykseen liittyvä konjektuuri, joka ratkesi aivan tässä viime aikoina kielteisesti eli siihen löytyi vastaesimerkki: Yaroslav Shitov, Counterexamples to Hedetniemi’s conjecture.
Ohjelmakoodit (Python)
INFTY = 2**56 #number larger than any other occuring one
def hedetniemiMatrixSum(a, b):
m = len(a)
n = len(b)
p = len(b[0])
return [[min(a[i][k] + b[k][j] for k in range(n))
for j in range(p)]
for i in range(m)]
def findStableHedetniemiSum(a):
n = len(a)
prev = a
b = a
counter = 0
while counter<n:
b = hedetniemiMatrixSum(b, a)
if b == prev: break
prev = b
return b
def findPath(start, end, minDMat, a):
"""
start: index of the start node
end: index of the target node
minDMat: the stabilized matrix
containing the minimum paths lenghts
a: the weighted adjacency matrix
"""
n = len(a)
path = [end]
dist = minDMat[start][end]
if dist>=INFTY: return None #no path exists
curr = end
def findPrev():
for i in range(n):
if i==curr: continue
if dist-a[i][curr] == minDMat[start][i]: return i
counter = 0
while curr != start and counter<n:
prev = findPrev()
dist -= a[prev][curr]
curr = prev
path.append(curr)
return path[::-1]
#the example matrix
a = [
[0,1,2,INFTY,INFTY,8,INFTY],
[1,0,4,2,INFTY,INFTY,INFTY],
[2,4,0,INFTY,7,INFTY,INFTY],
[INFTY,2,INFTY,0,1,INFTY,INFTY],
[INFTY,INFTY,7,1,0,INFTY,2],
[8,INFTY,INFTY,INFTY,INFTY,0,1],
[INFTY,INFTY,INFTY,INFTY,2,1,0]
]
b = findStableHedetniemiSum(a)
print b
print findPath(0, 6, b, a)
